Design
Rob-O-Matic
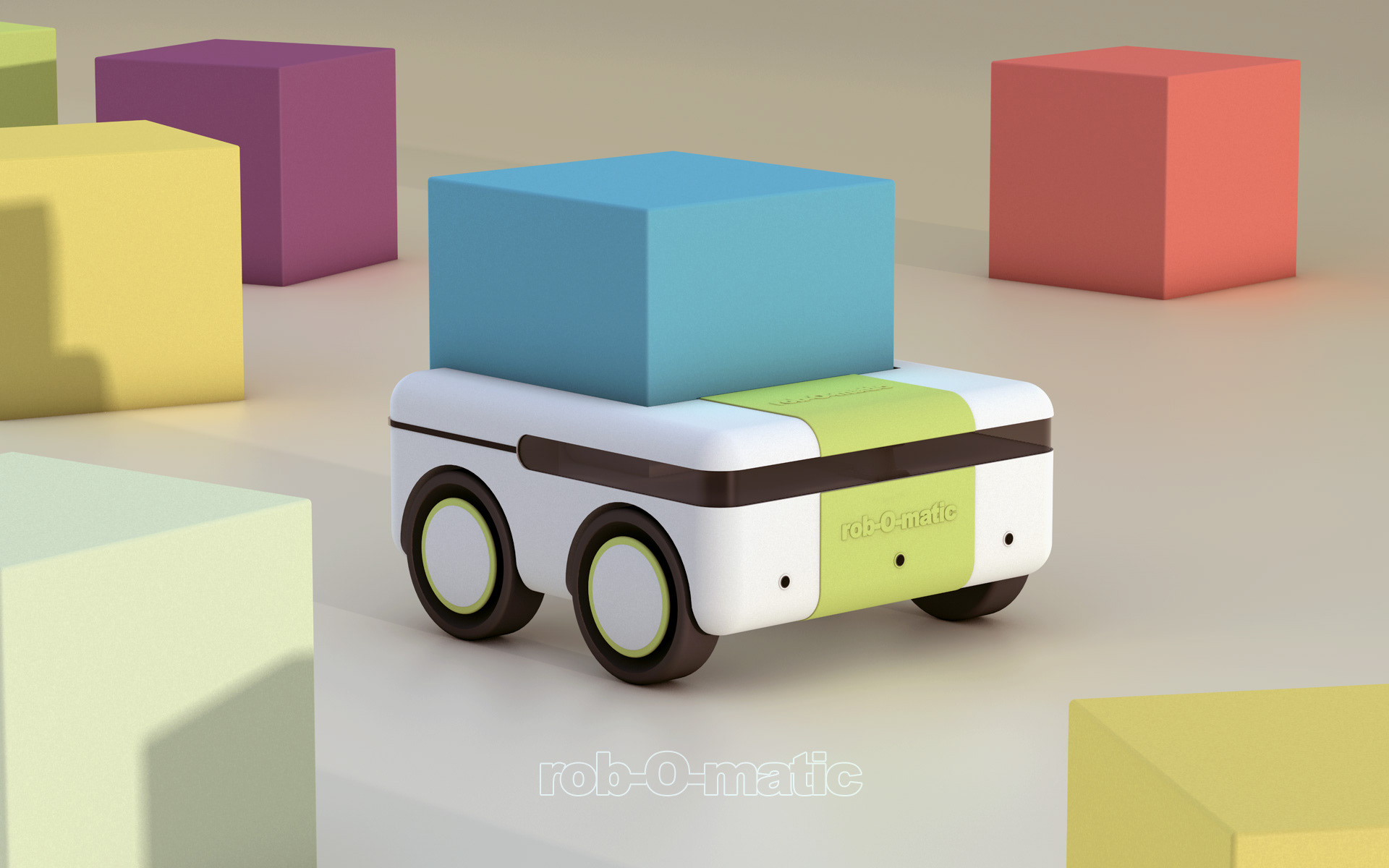
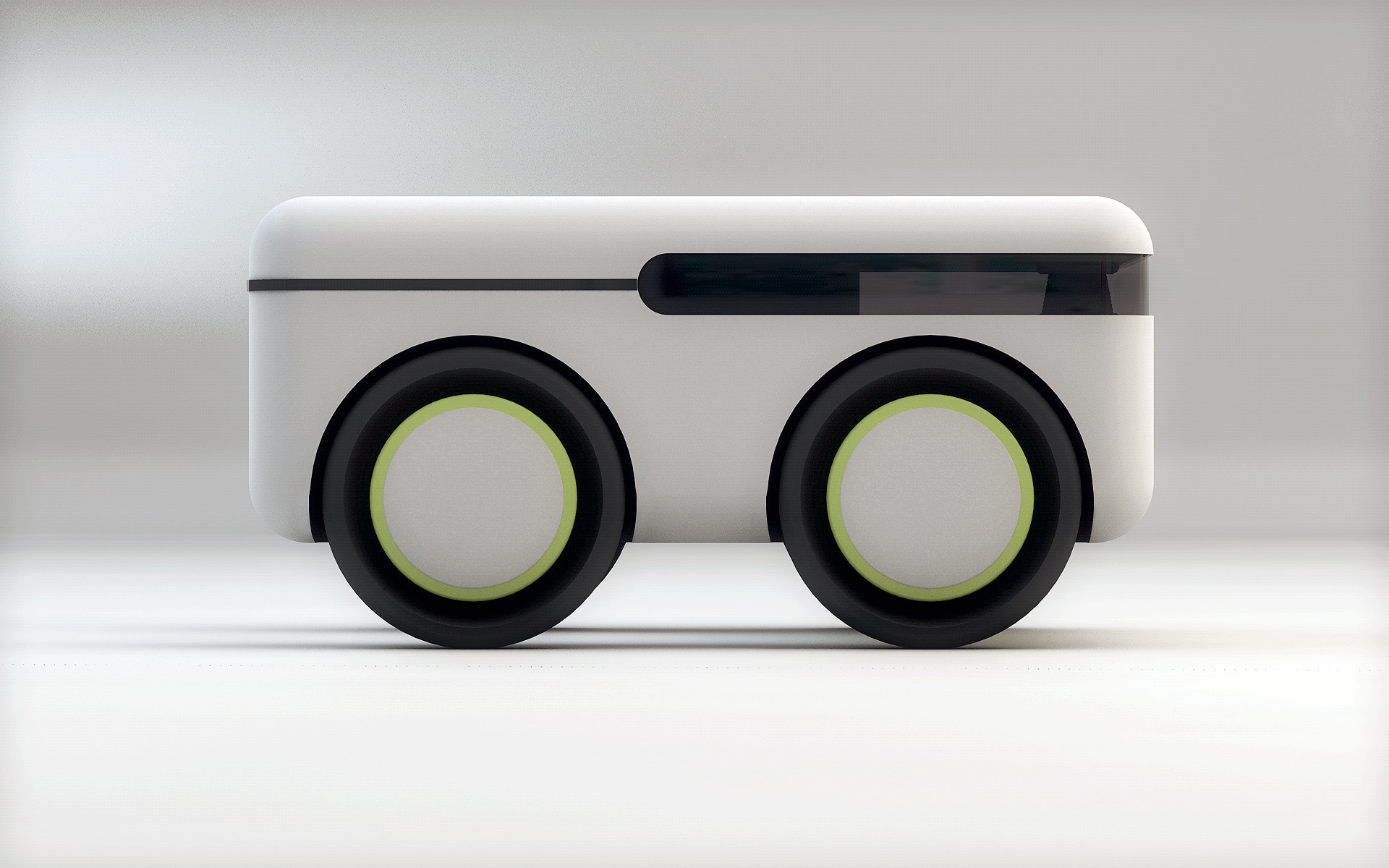
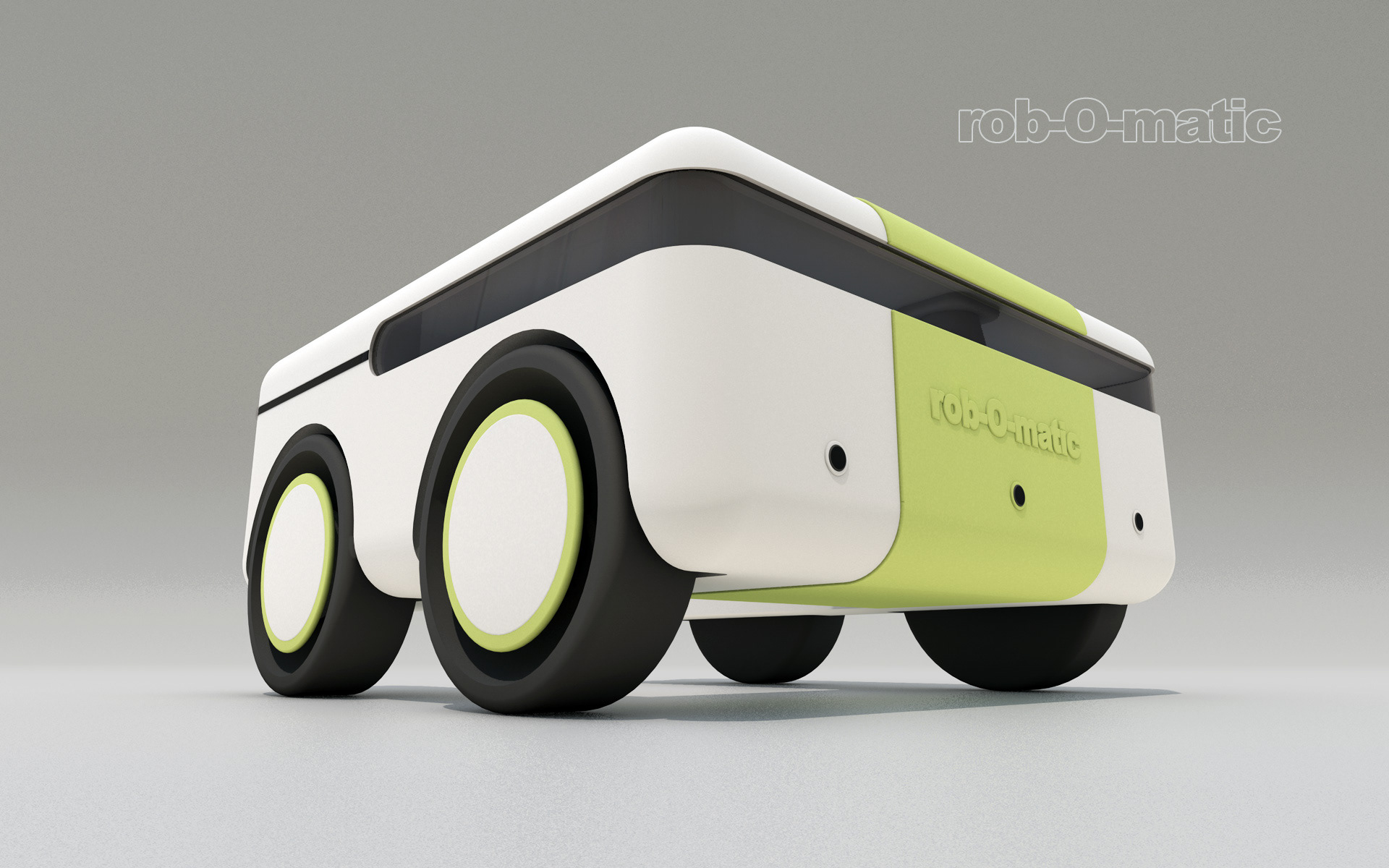
Rob-o-matic é um robô autônomo multifuncional criado por Philippe Lucidarme, doutorando em robótica pela Universidade de Montpellier, na França.
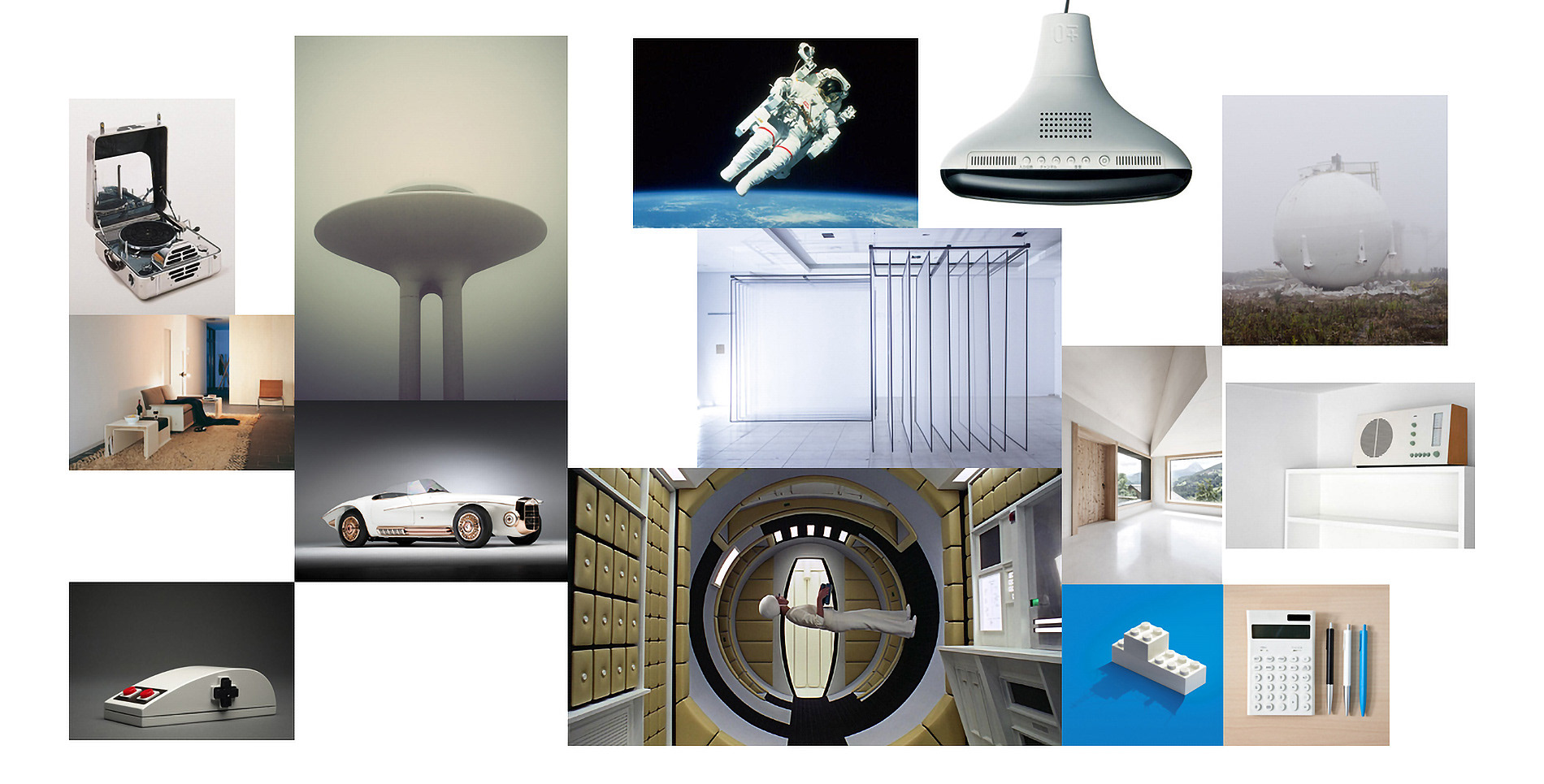
Esse projeto conceitual foi encomendado por Philippe para atribuir uma nova aparência ao seu projeto original. O desenvolvimento do novo design começou com o mapeamento de referências visuais para um painel semântico.
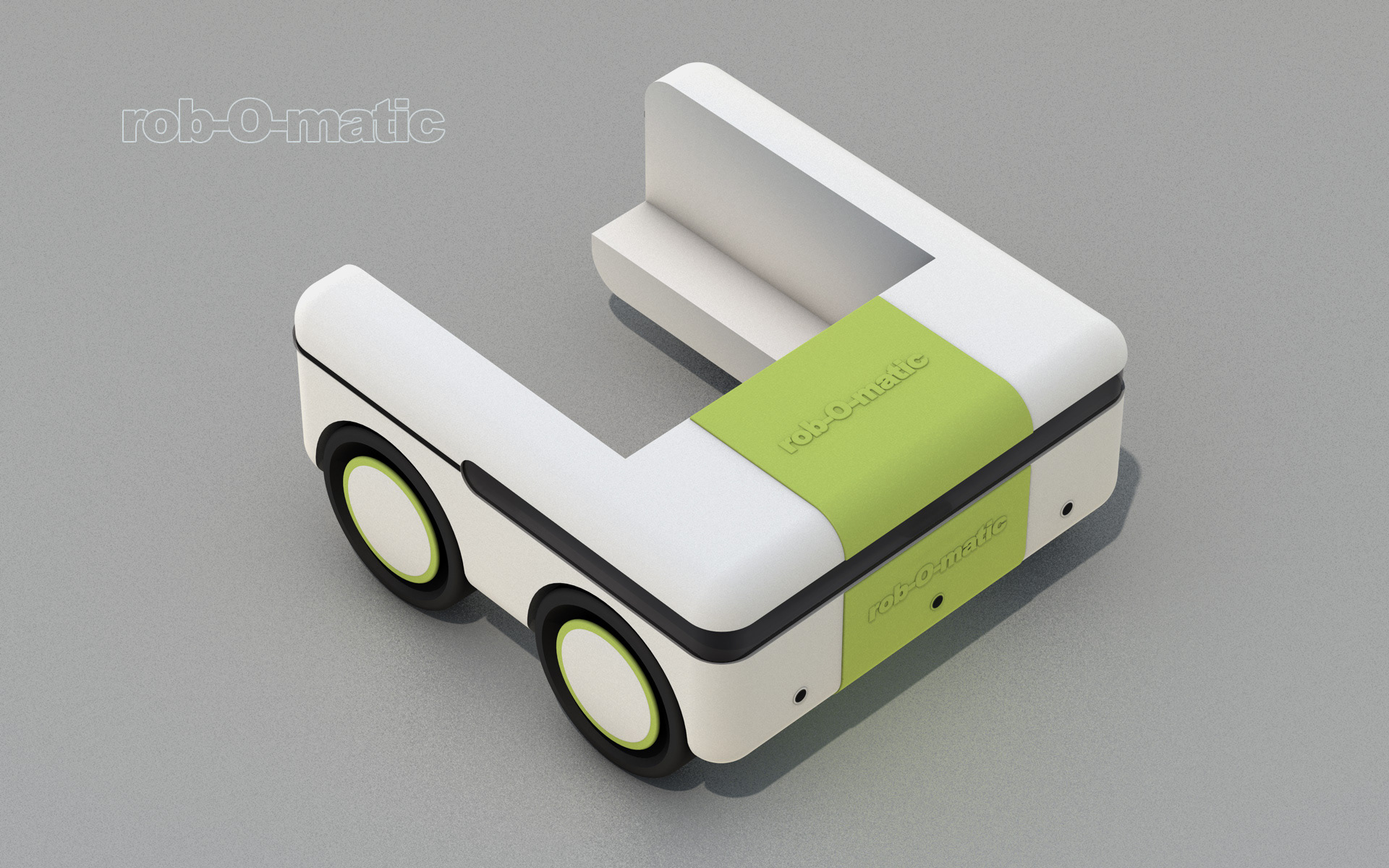
Depois, considerando as referências visuais e também as especificações mecânicas e a estrutura do projeto original, foram concebidas a nova forma e cores para os componentes.
O estilo minimalista, com cores quase neutras, proporciona a adequação do produto a diferentes contextos, além de facilitar o manuseio, a limpeza e a manutenção.
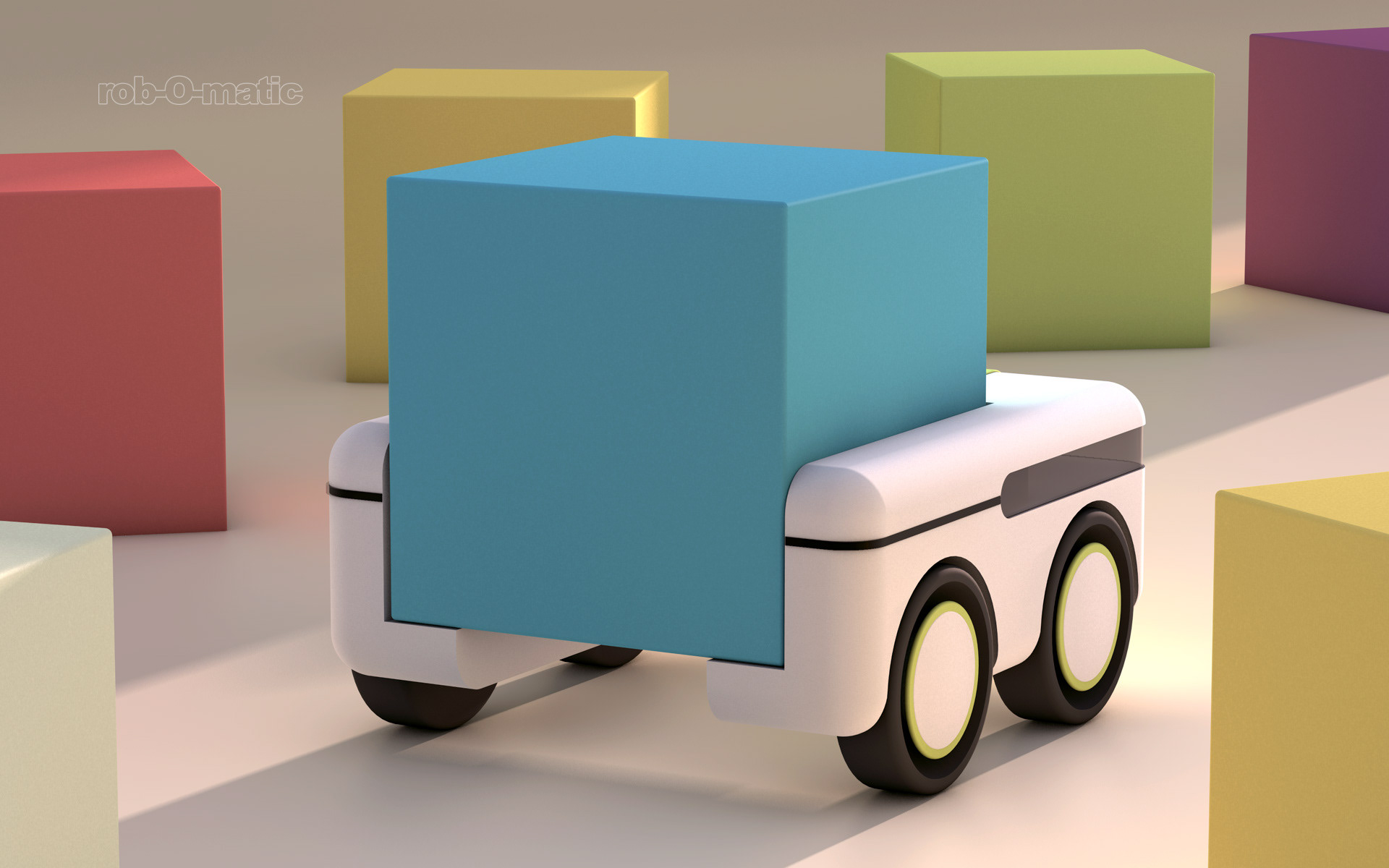
A montagem do chassi permite maior amplitude de alcance para o seu sistema L.I.D.A.R (Light Detection And Ranging). As rodas grandes permitem um trânsito fácil e a superação de eventuais obstáculos em diferentes superfícies.